Robot impara il Lip Sync guardando video umani
Lip Sync robotico: la tecnologia che cambierà l’interazione uomo‑macchina.
Lip Sync robotico: la tecnologia che cambierà l’interazione uomo‑macchina.
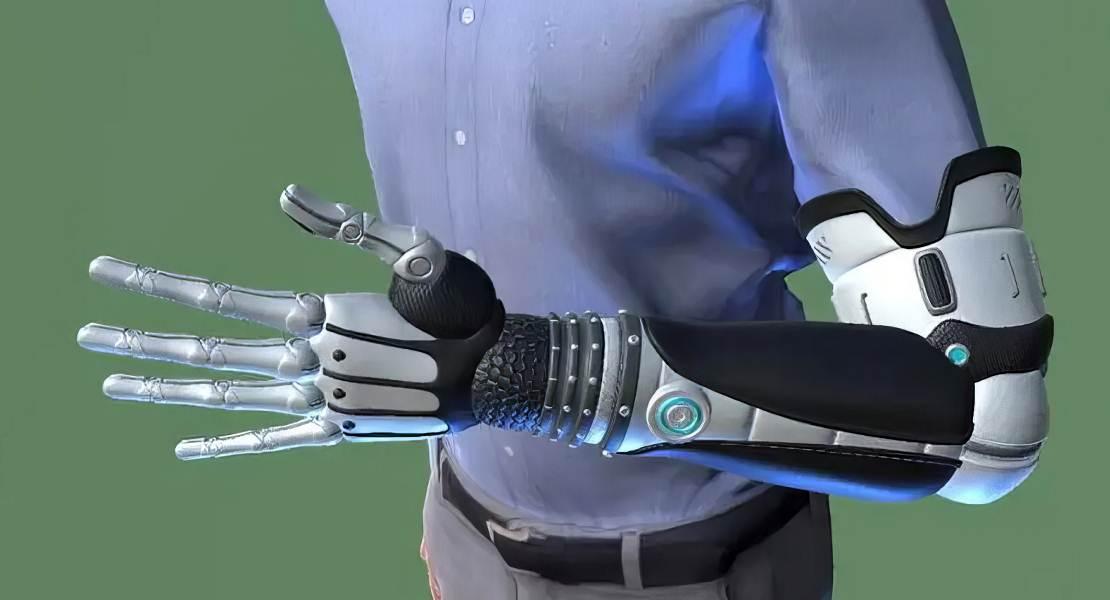
Fino a che punto un braccio robotico autonomo può sembrare parte del corpo umano.

Robot microscopici con cervello integrato: ora possono compiere attività autonome.
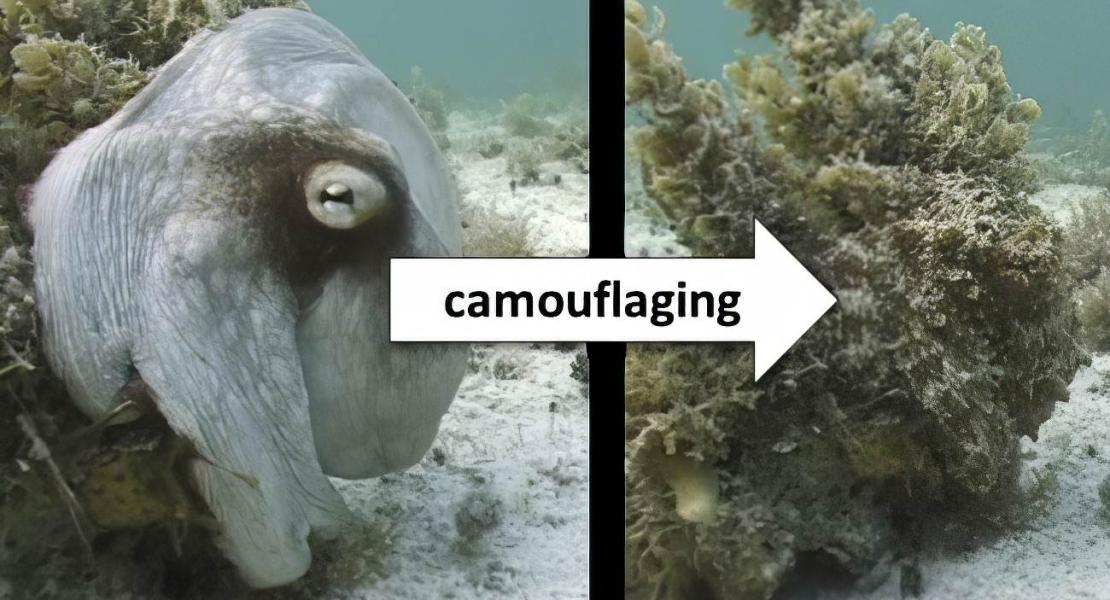
OCTOID, il nuovo robot che si trasforma come un polpo sott’acqua.
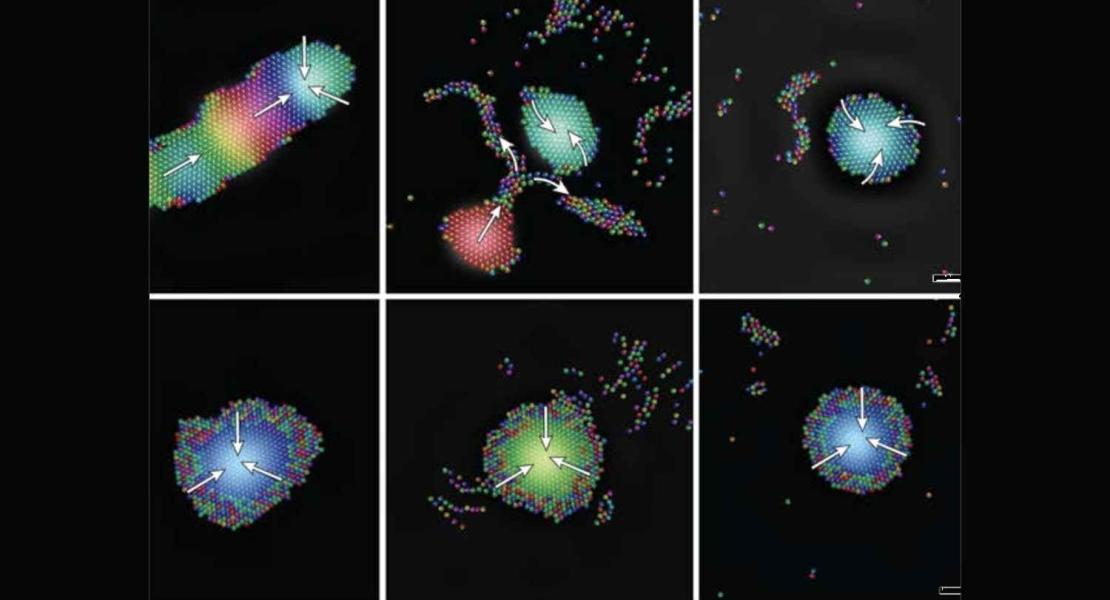
Sciami di microrobot guidati da onde sonore: la nuova frontiera della robotica.
Velocità e autonomia in formato tascabile: il nuovo robot bipede rivoluzionario.

Sviluppato un robot morbido in grado di saltare sia in avanti che indietro.
Materiale senza motori o ingranaggi interni che può espandersi, muoversi e assumere nuove forme come un robot.

Un piccolo Robot volante ispirato agli insetti può cambiare la traiettoria e centrare obiettivi.
Farmaci somministrati all'interno del corpo da un minuscolo robot.