
{kind=link}

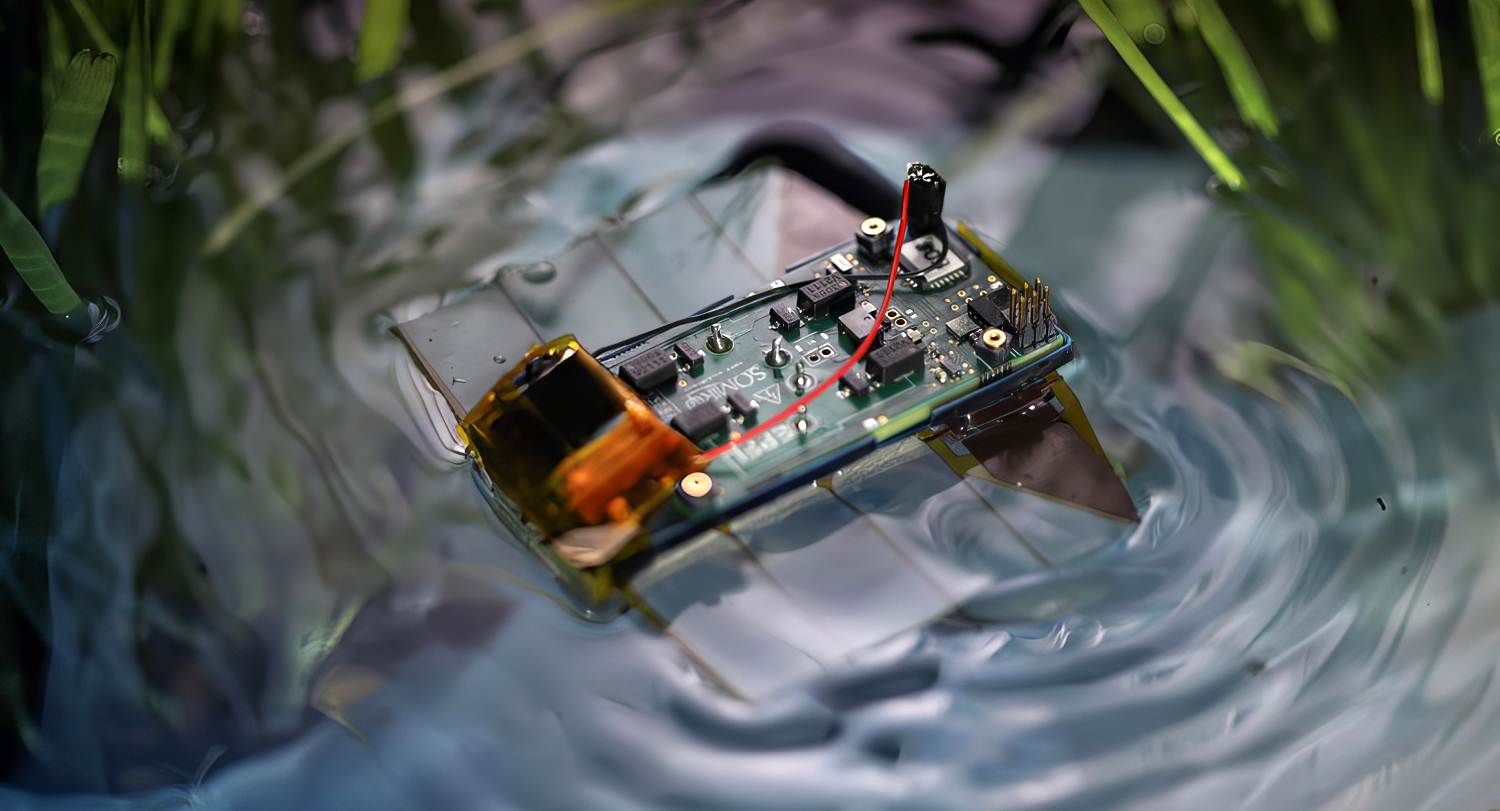
Il nuovo robot nuotatore che utilizza pinne ondulate silenziose per un movimento preciso in spazi acquatici stretti.
{kind=link}

{kind=link}

Sviluppato un robot natatorio versatile che si muove agilmente su superfici d'acqua affollate. Ispirato ai platelminti marini, l'innovativo dispositivo offre nuove possibilità per il monitoraggio ambientale e la ricerca ecologica
I robot nuotatori svolgono un ruolo cruciale nella mappatura dell'inquinamento.
Nello studio degli ecosistemi acquatici e nel monitoraggio della qualità dell'acqua in aree sensibili come le barriere coralline o le rive dei laghi. Tuttavia, molti dispositivi utilizzano eliche rumorose, che possono disturbare o danneggiare la fauna selvatica. Anche il disordine naturale presente in questi ambienti, tra cui piante, animali e detriti, rappresenta una sfida per i nuotatori robotici.
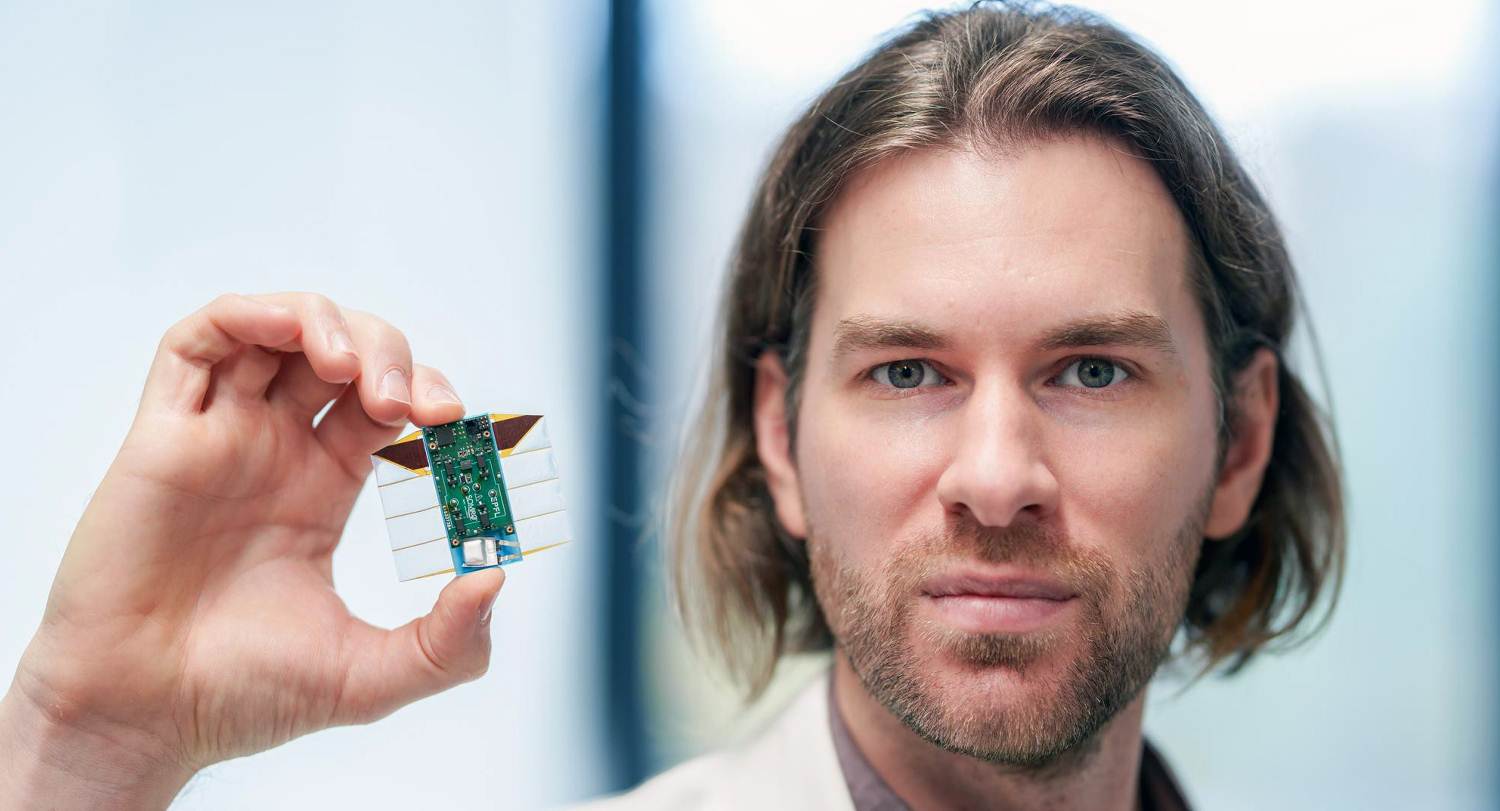
Ora, i ricercatori del Soft Transducers Lab (1) e del Unsteady flow diagnostics laboratoryLug (2) della Facoltà di Ingegneria dell'école polytechnique fédérale de Lausanne (EPFL) e del Max Planck Institute for Intelligent Systems (3) hanno sviluppato un robot compatto e versatile in grado di muoversi in spazi ristretti e trasportare carichi molto più pesanti di lui. Più piccolo di una carta di credito e con un peso di 6 grammi, l'agile robot nuotatore è ideale per ambienti con spazi limitati come le risaie, o per eseguire ispezioni su macchinari trasportati dall'acqua. La ricerca è stata pubblicata su Science Robotics (4).
«Nel 2020, il nostro team ha dimostrato robot striscianti autonomi delle dimensioni di un insetto, ma realizzare robot ultrasottili senza fili per ambienti acquatici è una sfida completamente nuova», afferma il dottor Herbert Shea, responsabile del Soft Transducers Lab dell'EPFL. «Abbiamo dovuto partire da zero, sviluppando attuatori morbidi più potenti, nuove strategie di locomozione ondulatoria ed elettronica compatta ad alta tensione».
Elettronica miniaturizzata per il funzionamento autonomo
A differenza dei tradizionali sistemi a elica, il robot dell'EPFL utilizza pinne silenziose e ondulate, ispirate ai platelminti marini, per la propulsione. Questo design, unito alla sua leggerezza, consente al robot di galleggiare sulla superficie dell'acqua e di integrarsi perfettamente nell'ambiente naturale.
«Il nostro progetto non si limita a riprodurre la natura; va oltre ciò che gli organismi naturali possono realizzare», spiega il dottor Florian Fernand Hartmann (5), ex ricercatore dell'EPFL, ora a capo di un gruppo di ricerca presso il Max Planck Institute for Intelligent Systems di Stoccarda, in Germania.
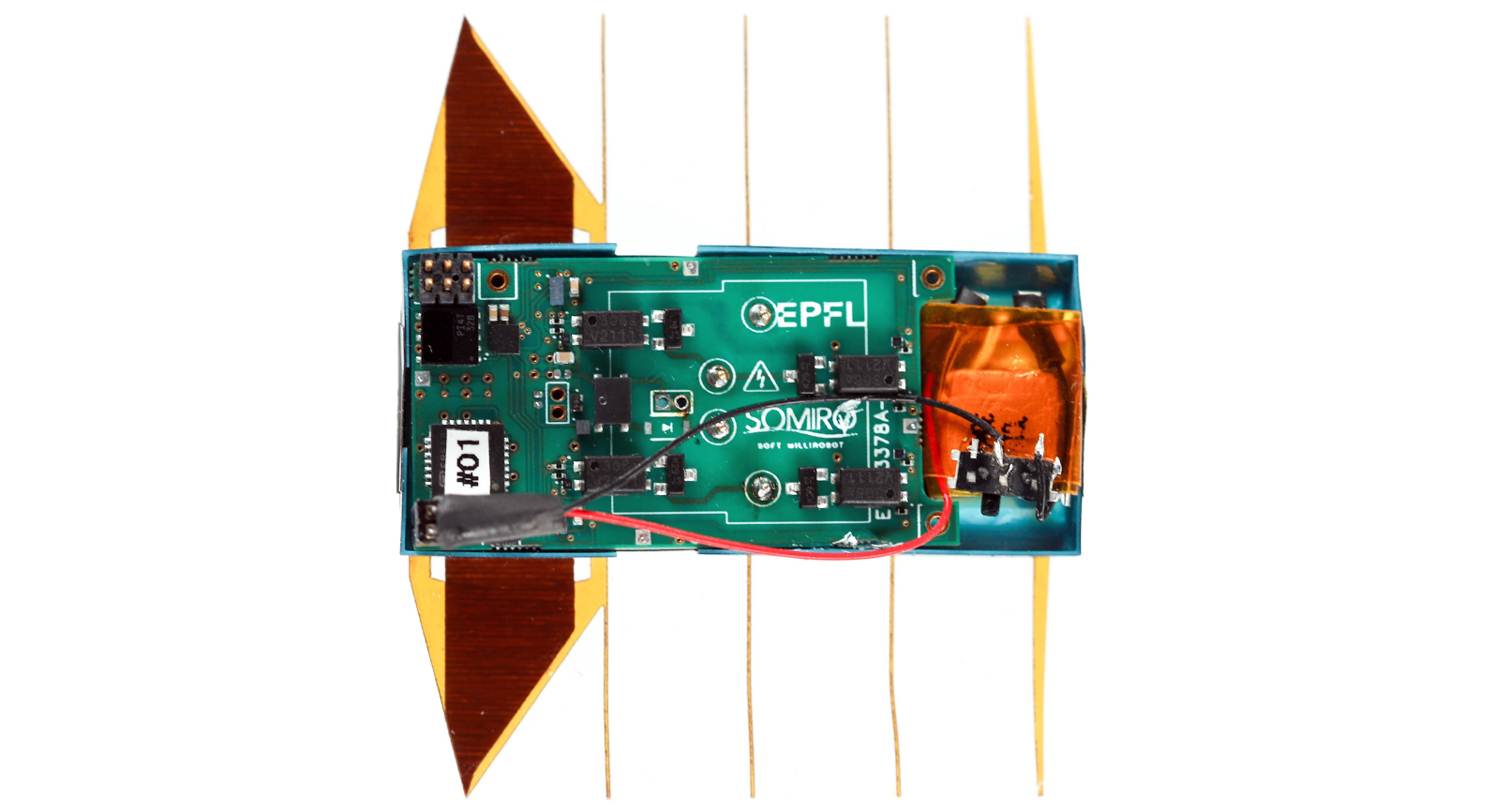
Oscillando le pinne fino a 10 volte più velocemente dei platelminti marini, il robot può raggiungere velocità impressionanti di 12 centimetri (2,6 lunghezze corporee) al secondo. Il robot raggiunge anche una manovrabilità senza precedenti utilizzando quattro muscoli artificiali per azionare le pinne. Oltre a nuotare in avanti e a virare, è in grado di nuotare all'indietro e lateralmente in modo controllato.
Per azionare il robot, i ricercatori hanno sviluppato un sistema di controllo elettronico compatto che fornisce fino a 500 volt agli attuatori del robot con una potenza di soli 500 milliwatt, quattro volte inferiore a quella di uno spazzolino elettrico. Nonostante l'utilizzo di alta tensione, le basse correnti e i circuiti schermati del robot lo rendono completamente sicuro per l'ambiente. I sensori di luce fungono da semplici occhi, consentendo al robot di rilevare e seguire autonomamente le fonti luminose.
I ricercatori prevedono che il robot contribuisca agli studi ecologici, al monitoraggio dell'inquinamento e all'agricoltura di precisione, tra gli altri campi. I prossimi passi prevedono la creazione di una piattaforma più solida per i test sul campo.
«Puntiamo a estendere i tempi di funzionamento e a migliorare l'autonomia», afferma Florian Fernand Hartmann. «Le intuizioni fondamentali acquisite da questo progetto non solo faranno progredire la scienza della robotica bioispirata, ma getteranno anche le basi per sistemi robotici pratici e realistici, in armonia con la natura».
Riferimenti:
(1) Soft Transducers Laboratory ‐ EPFL
(2) Unsteady flow diagnostics laboratory ‐ EPFL
(3) Biomimetic Materials and Machines – Max Planck Institute for Intelligent Systems
(4) Highly agile flat swimming robot
Descrizione foto: Il nuovo robot nuotatore che utilizza pinne ondulate silenziose per un movimento preciso in spazi acquatici stretti. Potrebbe rivoluzionare il monitoraggio ambientale e l'agricoltura di precisione. - Credit: EPFL-LMTS.
Autore traduzione riassuntiva e adattamento linguistico: Edoardo Capuano / Articolo originale: A miniature swimming robot inspired by marine flatworms