
{kind=link}
Un robot flessibile e semi-autonomo potrebbe potenzialmente individuare le vittime di catastrofi intrappolate sotto macerie e consegnare farmaci all'interno del corpo umano
Farmaci somministrati all'interno del corpo da un minuscolo robot.
Un robot minuscolo, morbido e flessibile che può strisciare attraverso macerie prodotte da un sisma per trovare vittime intrappolate o viaggiare all'interno del corpo umano per fornire medicine può sembrare una fantascienza, ma un team internazionale guidato da ricercatori di Penn State ha progettato tali robot adattabili integrando l'elettronica flessibile con un movimento controllato magneticamente.
La robotica morbida, a differenza dei tradizionali robot rigidi, sono realizzati con materiali flessibili che imitano il movimento degli organismi viventi. Questa flessibilità li rende ideali per la navigazione di spazi stretti, come i detriti in una zona di disastro o gli intricati percorsi del corpo umano. Tuttavia, l'integrazione di sensori ed elettronica in questi sistemi flessibili ha posto una sfida significativa, secondo Huanyu "Larry" Cheng (1), James L. Henderson, Jr. Memorial Associate Professor di Ingegneria Scienze e Meccanici di Penn State.
«La più grande sfida è stata quella di renderlo intelligente», ha affermato Cheng, autore di coordinamento dello studio del team pubblicato su Nano-Micro Letters (2). «Per la maggior parte delle applicazioni, la robotica morbida è stata un sistema di comunicazione a senso unico, il che significa che si basano sul controllo esterno per navigare attraverso ambienti complessi. Il nostro obiettivo era integrare sensori intelligenti in modo che questi robot potessero interagire con l'ambiente circostante e operare con un intervento umano minimo».
Un fattore principale nel rendere questi robot più intelligenti sta nell'integrazione dell'elettronica flessibile, che consente le loro caratteristiche chiave.
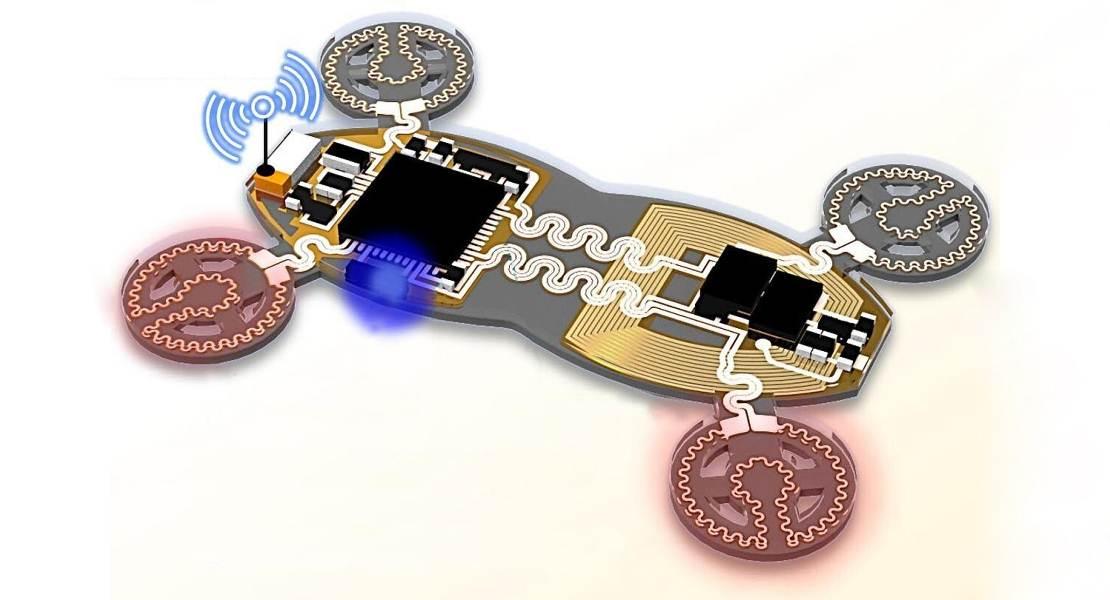
«Volevamo progettare un sistema in cui la robotica morbida e l'elettronica flessibile lavorano insieme senza soluzione di continuità», ha detto Cheng. «L'elettronica tradizionale è rigida, il che rende difficile l'integrazione. La nostra soluzione era quella di distribuire i componenti elettronici in modo da preservare la flessibilità del robot mantenendo prestazioni robuste».
Cheng e il suo team hanno girato i video dei robot in azione, catturando il loro comportamento dinamico mentre strisciano e rotolano in una palla per muoversi lungo un semplice percorso. I robot si muovono usando materiali magnetici duri incorporati nella loro struttura flessibile, che consente ai robot di rispondere prevedibilmente a un campo magnetico esterno. Regolando la forza e la direzione del campo, i ricercatori possono controllare i movimenti dei robot, come piegarsi, torcere o strisciare, senza potenza a bordo o connessioni fisiche come i fili.
Un grande ostacolo nello sviluppo di questa tecnologia è stato capire come impedire all'elettronica flessibile di contrastare il movimento del robot.
«Anche se abbiamo progettato l'elettronica per essere flessibile, la loro rigidità è ancora da centinaia a migliaia di volte maggiore del materiale robotico morbido», ha detto Cheng. «Per superare questo, abbiamo distribuito l'elettronica attraverso la struttura, riducendo il loro impatto sul movimento».
Un'altra sfida è stata il blocco di interferenze elettriche indesiderate, il che può interrompere il funzionamento di un dispositivo elettronico o di un sistema. Questa interferenza proviene da fonti esterne, come altri elettronici o segnali wireless. Tale interferenza ostacolerebbe il movimento e influenzerebbe le prestazioni del sensore.
«I campi magnetici sono cruciali per il controllo del movimento, ma possono anche interrompere i segnali elettronici», ha osservato Cheng. «Abbiamo dovuto progettare attentamente il layout elettronico per ridurre al minimo queste interazioni, garantendo che i sensori rimangano funzionali anche in presenza di forti campi magnetici».
Con l'interferenza magnetica minimizzata, i robot possono essere guidati in remoto usando campi elettromagnetici o magneti portatili, il che limita l'intervento umano di cui hanno bisogno. Inoltre, i sensori integrati consentono loro di reagire autonomamente ai segnali ambientali. Nella ricerca e salvataggio, ad esempio, sono abbastanza intelligenti da navigare per i detriti rilevando calore o ostacoli. Nelle applicazioni mediche, potrebbero rispondere alle variazioni di pH o alla pressione, garantendo una consegna precisa dei farmaci o una raccolta accurata del campione.
Il prossimo passo per il team di Cheng è perfezionare la tecnologia per tali applicazioni, inclusa la creazione di una “pillola robot”.
«Una delle potenziali applicazioni più affascinanti è nei dispositivi medici impiantabili», ha affermato il co-autore Suk-Won Hwang (3), professore associato presso la Graduate School of Converging Science and Technology, Korea University. «Stiamo lavorando sulla miniaturizzazione del sistema per renderlo adatto all'uso biomedico. Immagina un piccolo sistema robotico che potrebbe essere inghiottito come una pillola, navigare attraverso il tratto gastrointestinale e rilevare malattie o consegnare farmaci esattamente dove sono necessari».
Tale tecnologia potrebbe fornire un'alternativa meno invasiva alle tradizionali procedure diagnostiche, come le biopsie, la raccolta di dati direttamente dal paziente in tempo reale, secondo i ricercatori.
«Con sensori integrati, questi robot potrebbero misurare i livelli di pH, rilevare anomalie e persino fornire farmaci a posizioni precise all'interno del corpo», ha spiegato Cheng. «Ciò significa meno interventi chirurgici invasivi e trattamenti più mirati, migliorando i risultati dei pazienti».
Cheng ha affermato di prevedere anche domande future nei trattamenti vascolari.
«Se riusciamo a rendere questi robot ancora più piccoli, potrebbero essere iniettati nei vasi sanguigni per trattare le malattie cardiovascolari o consegnare farmaci direttamente alle aree colpite», ha detto Cheng. «Ciò aprirebbe possibilità completamente nuove per trattamenti medici non invasivi».
Mentre la squadra non ha ancora dato a questi robot un nome ufficiale, Cheng ha affermato di essere aperti a suggerimenti.
«Questo è un buon suggerimento», ha detto con una risata. «Forse dovremmo coinvolgere il pubblico nel nominarli».
I lettori sono invitati a presentare idee di denominazione a Cheng all'indirizzo huanyu.cheng(at)psu.edu.
Insieme a Cheng e Hwang, altri autori dello studio di Penn State includono Bowen Li, assistente di ricerca in scienze e meccaniche ingegneristiche e Ankan Dutta, studente di dottorato in ingegneria meccanica che è anche affiliata al Center for Neural Engineering. Joong Hoon Lee, Gwan-Jin Ko, Tae-Min Jang, Won Bae Han, Speeng Min Yang, Dong-Je Kim, Heeseok Kang, Jun Hyeon Lim, Chan-Hwi Eom e So Jeong Choi, Ku-Ku-Kist Graduate School of Converging Science and Technology, Korea University; e Sungkeun Han, Semiconductor R&D Center, Samsung Electronics Co., hanno anche contribuito alla stesura dell'articolo. Hanno supportato queta ricerca il National Research Foundation of South Korea e la Korea Institute of Science and Technology.
Riferimenti:
(2) Wireless, Multifunctional System-Integrated Programmable Soft Robot
(3) Suk-Won Hwang
Descrizione foto: Questi piccoli robot usano il magnetismo per muoversi ed esplorare spazi stretti, potenzialmente includendo macerie di disastro o il corpo umano. - Credit: Jennifer M. McCan.
Autore traduzione riassuntiva e adattamento linguistico: Edoardo Capuano / Articolo originale: Tiny, soft robot flexes its potential as a life saver